日前,由深圳蓝侠机器人有限公司与哈尔滨工业大学(深圳)联合研制的我国首台“蓝侠”智能冬枣采摘机器人在陕西大荔进行实地实验,达到了预期作用,推动了科技成果向农业新质生产力的转化,也将助推该县冬枣工业向更高质量、愈加现代化的方向跨进。
“此次咱们要要点测验两方面:一是机器人在不同光线、不同叶面遮挡和杂乱布景下的果实辨认准确度;二是机器人在不同路面条件下的自主运动规划才能等系列关键技能。”哈尔滨工业大学(深圳)副教授王愤然介绍道。

“本年两会,AI技能成为焦点。这让我想到,能否用AI赋能机器人,处理大荔冬枣采摘的深重体力劳动?”本年全国两会上,全国人大代表、大荔县东城大街畅家村党总支书记马红丽就提到了全力开展机器人促进冬枣工业高水平开展的主张,通过深圳蓝侠机器人有限公司与哈尔滨工业大学半年多的联合研制攻坚,首台智能冬枣采摘机器人总算落地实验,让她感到特别欣喜和骄傲。
“真没想到机器还能进枣园摘枣子,亲眼看到这场景真的震慑,科技的力气真了不得。我就住在邻近,由于咱们那儿现在正开展黄花菜工业,要是冬枣能用机器人摘,那黄花菜采摘必定也能完结。”家住苏村镇的李小亮听说有机器采摘实验,特地赶来现场观看。
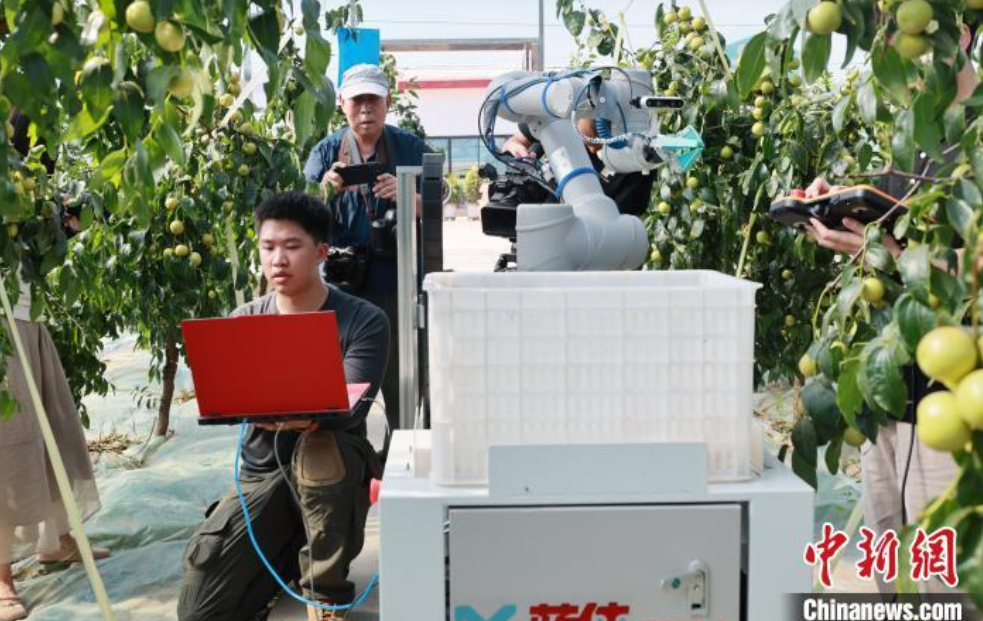
据了解,“蓝侠”机器人通过多光谱成像技能及自主练习的人工智能视觉模型,具有杂乱布景下辨认枝叶遮挡荫蔽果实的才能,仿生型柔性多指夹爪可自适应果实形状及巨细,多自在度协作机械臂调配自研的手眼协同算法可灵敏精准挨近方针果实。通过实验,机器人单果采摘间隔在8秒左右、熟果抓取成功率挨近85%、果实损害率小于8%。别的,自主规划安装的多地势底盘车可自在移动于1至2垄距离的场所,这些特性都很合适大荔县冬枣的精细化办理需求。
“现在,针对第二代样机,咱们方案在未来2到3个月内,赶快完结其场景自适应性的改善。第三代样机的开发方案紧随其后,估计在未来6到8个月内完结。现在机器人是单臂作业,未来咱们方案晋级为装备多臂和多个摄像头的‘三头六臂’机器人形象,以大幅度的进步采摘功率。”王愤然表明,他们一起致力于下降产品成本,保证终究产品能为农人带来真实的实惠和实用价值。(完)

 QQ客服
QQ客服